
Projet LOCA 3D: Localisation Indoor par une approche multi SLAM
Accueil >
Réalisations >Vision et robotique >
Projet LOCA 3D: Localisation Indoor par une approche multi SLAM
Objectif du projet Loca 3D
Catégorie :
Vision industrielle et robotique
Le challenge MALIN, mis en place par la DGA et l'ANR, vise à la création d'un système permettant de suivre des agents d'interventions d'urgences (militaires, policiers ... ) dans des environnements complexes Indoor inconnus (tels que des endroits sombres, enfumés ... )
Pour répondre à ce challenge, Innodura s’est associée au laboratoire IBISC qui mène des recherches théoriques et appliquées dans le domaine de la vision et à l’équipe Titane de l’INRIA, spécialisée dans la modélisation géométrique d’environnements 3D.
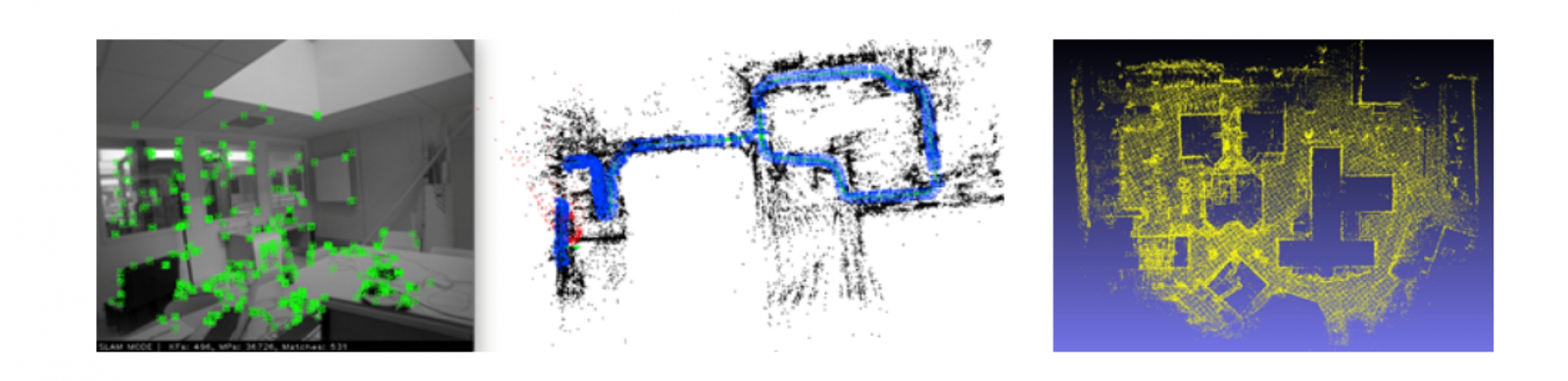
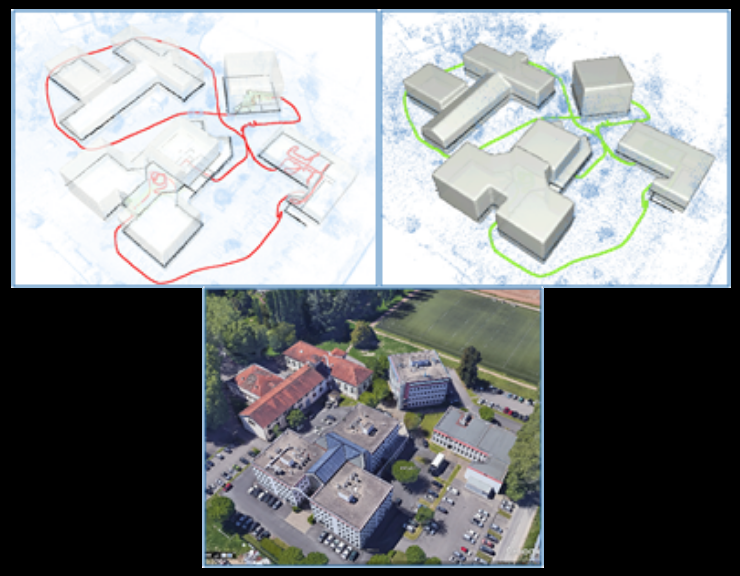
La 3ème compétition de ce challenge s’est déroulée fin janvier 2021 à Bourges. Notre projet se concentre sur la fusion de deux technologies SLAM complémentaire et efficace en tout milieux. Le SLAM Lidar et le SLAM visuo-inertiel sont utilisés pour générer une cartographie 3D.
Solution mise en place par INNODURA TB
La technologie que INNODURA a développé permet de fournir une localisation INDOOR précise du lieu où se trouve l’agent d’intervention quelles que soient les conditions environnementales :
- Premièrement, INNODURA s’est concentré sur le développement d’un SLAM LIDAR (InnoSLAM, sur base Kitware), alimenté par un LIDAR 3D Velodyne. Les principaux avantages du SLAM sont; la pose robuste avec très peu de dérive et ses données cartographiques directement exploitables. En revanche, il ne possède pas de détection de fermeture de boucle.
- C'est pour cela, qu'INNODURA en collaboration avec son partenaire IBISC ont mis en place un SLAM visuo-inertiel basé sur l’algorithme VINS Fusion. Celui-ci a les avantages d’être temps réel, peu gourmand en ressources, robustes et avec de faibles dérives grâce à notre caméra NIR et son éclairage infrarouge. De plus, les fermetures de boucles détectées par VINS Fusion permettent de corriger le InnoSLAM.
Enfin, notre partenaire INRIA utilise les cartes internes d’InnoSLAM pour réaliser une cartographie sémantique de l’environnement dans lequel l’agent d'intervention d'urgence évolue.

Matériel utilisé pour le projet Loca 3D



Publications
Notre approche innovante de fusion SLAM visuo-inertiel / SLAM LiDAR a fait l’objet de 2 publications dans des conférences internationales :

- IROS 2020 : Real-Time Multi-SLAM System for Agent Localization and 3 Mapping in Dynamic Scenarios.
- MED 2020 : Indoor Localization and Mapping : Towards Tracking Resilience Through a MultiSLAM Approach.

Nous écrire
Les champs indiqués par un astérisque (*) sont obligatoires





À découvrir également
Forte de ses compétences en développement LabVIEW, Innodura TB propose une activité entourant la formation des développeurs LabVIEW.
En savoir plus

Innodura TB propose une assistance technique à ses clients avec la mise à disposition d'ingénieurs experts en développement LabVIEW pour une durée déterminée ou indéterminée suivant la taille du projet.
En savoir plus
De part son expérience en ingénierie système, Innodura TB porte un regard très précis sur les solutions à apporter à un système complexe.
En savoir plus